| 产品特性:滚柱丝杠 | 品牌:GSA | 型号:RGTI |
| 适用机床:皆可 | 最大载荷:67kN | 丝杆外径:18mm |
| 丝杆底径:17mm | 丝杆螺距:4mm | 是否库存:是 |
| 是否批发:是 | 规格:G3 |
联系电话微信同号18611114454
产品范围:专业致力于直线传动产品的全套解决方案,经营产品包括:
◆道臣DOSSON(国内组装):伺服电动缸、六自由度平台、直线滑台、螺旋升降机;
◆瑞士GSA:行星滚柱丝杠副(磨制)、精密锁固螺帽;
◆奥地利ENZFELDER恩兹菲尔德:螺旋升降机、蜗轮蜗杆电动缸、锥齿轮箱、多级/多节螺旋升降机;
◆瑞士Eichenberger艾肯伯格:微型滚珠丝杠副(轧制);
◆德国卡莫勒:滚珠丝杠副(磨制)
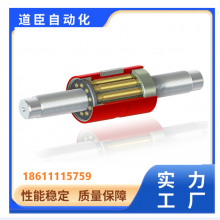
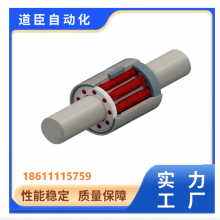
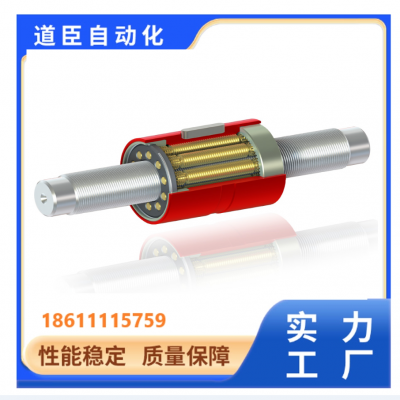
;Planetary Roller Screw 一、原理与技术特点 行星滚柱丝杠是将旋转运动转化为直线运动,传动单元为丝杠及螺母之间的滚柱,与滚珠丝杠的主要区 别是负载的传递单元使用螺纹滚柱而不是滚珠。 与滚珠丝杠相比: 行星滚柱丝杠由于高数量接触点,能够承受更高的静态负载和动态负载,静载为滚珠丝杠的 3 倍,寿命 为滚珠丝杠的 15 倍; 大量的接触点和接触点的几何结构使行星丝杠比滚珠丝杠具有更强的刚度和抗冲击能力,同时也可以提 供更高的转速及更大的加速度; 行星滚柱丝杠为螺纹传动,螺距设计范围更广,行星滚柱丝杠的导程可以设计的比滚珠丝杠更小; 行星滚柱丝杠与滚珠丝杠结构对比如下:
机器人需要什么:高效率,紧凑尺寸
在精密螺丝技术方面,有三种基本选择:梯形丝杠、滚珠丝杠和滚柱丝杠。梯形丝杠在设计和材料选择方面是通用的,但它们的效率和负载能力相对较差。滚珠丝杠具有很好的效率,但是当应用时需要较小的丝杠直径和较低的螺母,负载能力受到影响,因为负载球也必须非常小。滚柱丝杠,另一方面,有良好的推力能力在一个紧凑的整体尺寸,与***的效率-世界。举个例子:当比较不同直径相似的螺杆技术的负载能力和效率值时,均为1mm导程,滚子螺丝的载荷是滚珠螺杆的四倍,效率是梯形丝杠的两倍。

这种性能和设计特点的结合使滚柱丝杠成为许多机器人和机器人相关应用的理想解决方案。例如,使用线性激活连接的机器人(类似于你的二头肌控制你前臂运动的方式)从较高的负载等级和较低的重量滚子螺丝执行器中获益。
在机器人夹持器的应用中,滚子螺丝可以提供安全夹持所需的极高水平的保持力--并且可以在最小的扭矩输入下这样做。高强度和低输入扭矩相结合的关键是使用一个带有很小铅的螺丝,比如
这种性能和设计特点的结合使滚柱丝杠成为许多机器人和机器人相关应用的理想解决方案。例如,使用线性激活连接的机器人(类似于你的二头肌控制你前臂运动的方式)从较高的负载等级和较低的重量滚子螺丝执行器中获益。
在机器人夹持器的应用中,滚柱丝杠可以提供安全夹持所需的极高水平的保持力--并且可以在最小的扭矩输入下这样做。高强度和低输入扭矩相结合的关键是使用一个带有很螺母的螺杆,滚轴RVR型再循环滚柱丝杠 ,可制造低至0.5毫米或0.25毫米的导程。
滚柱丝杠也可用于机械臂加工的机器人端.在这些应用中,滚柱丝杠在小包装中产生高推力的能力比其他解决方案提供了一个优势。这是因为保持低质量对于坐在机器人手臂末端的部件至关重要。位于机器人手臂末端的重载产生了***的惯性,使机器人的动作更难以***控制,在某些情况下,还需要更大的马达和其他传动系统部件。这种优良的功率-重量比是机器人点焊机和自动铆钉绝大多数使用滚轴螺丝驱动的一个关键原因。
机器人和移动应用的趋势
现代计算机、制造方法和电池技术导致了自动化和电气化的快速发展,创造了一系列新的机器人和移动应用程序,而这些在几年前还不可能实现。一个例子是ch.utah.edu/utah-bionic-leg/"> 活性假体 (由电动机驱动的修复术),大大改善了截肢者的功能和使用。
与大型工业机器人不同的是,每一个关节都使用自己的电动机和变速箱,许多主动修复器使用的是螺旋驱动的线性驱动,这使得设计更小,更轻,更强大。虽然各种类型的螺丝可以用于活性假体,滚子螺丝提供了一个重要的优势比其他技术-***性能与尺寸的比率。例如,直径只有3.5毫米的滚子丝杠--小到足以装在手掌上--可以将负载推到500磅,并在微米和亚微米范围内进行运动,以更好地模仿人类的关节和手指。
通过动力假肢和动力外骨骼在很大程度上取决于使这些设备更小、更轻、更方便用户的发展。滚柱丝杠通过提供微米和亚微米范围内的驱动能力,为所有这三个目标做出贡献,以更好地复制人体关节和手指。
动力外骨骼是另一种快速发展的机器人技术。事实上,从2021年到2026年,外骨骼市场预计将增长46%以上,而动力外骨骼在这一增长中所占份额更大(与被动外骨骼相比) 1 .
虽然我们希望能够对机器人进行程序设计,以承担任何对人类来说过于沉重或危险的人工任务,但是对于许多应用来说,这些变量太多了,无法实际应用,比如在住宅区修剪树枝。解决方案是一个人为驱动(外骨骼)或主动控制机器人。这个解决方案结合了人类的决策与较低的风险,较少的伤害,和提高的提升能力。就像假体一样,外骨骼面对与重量、尺寸和复杂性有关的设计限制。这里,也是极高的力量对尺寸和力量对重量比,使滚子螺丝一个理想的解决方案。
机器人应用程序越小,移动性越大,耗电量、尺寸和重量等属性就越成为制约因素。无论是无人机、自动水下飞行器还是空基飞行器,其需求都是相似的:在尽可能小的范围内,高效率、高强度和高可靠性。